در قالب فراخوان پژوهشهای عمیق شرکتهای دانشبنیان اعلام شد؛
فراخوان طراحی و توسعه برد AHRS و نرمافزار مربوطه برای استفاده در سامانه موبایلمپینگ زمینی و هوایی

توضیحات فراخوان
۱. مقدمه
هدف از انجام پژوهش، طراحی و توسعه نرمافزاری و سختافزاری AHRS است که در آن، مشاهدات خام سنجنده ژیروسکوپ، شتابسنج و مغناطیسسنج، مختصات پردازششده گیرنده تعیین موقعیت ماهوارهای برای مقاصد تعیین موقعیت و وضعیت حداقل 5 دوربین هوایی و زمینی در موبایل مپینگ با هم تلفیق و همزمانسازی میشوند.
اصولاً امروزه سیستمهای موبایل مپینگ حرف اول را در صنعت مهندسی نقشهبرداری میزنند و هنوز یک سامانه مستقل موبایلمپینگ برای رفع نیازهای کشور در داخل کشور توسعه داده نشده است. علاوه بر این، شرایط تحریم، موجب عدم تأمین و پشتیبانی از این نوع سامانهها و صرف هزینههای بسیار زیاد برای آن است.
۲. پیشینه مسئله تحقیقاتی
فناوری ناوبری ترکیبی، یک حوزه روبهرشد بهخصوص در بخش نظامی از جنگ جهانی دوم بوده است. این فناوری در نقشهبرداری متحرک در سه دهه گذشته رشد بسیار پرشتابی داشته است بهطوری که امروزه صحبت از فناوری نقشهبرداری بدون آن، عملاً بیمعنی است. متأسفانه این حوزه چه در بخش تئوری، چه در بخش اجرا در بازار کار نقشهبرداری ایران مغفول مانده است. از دلایل این وضعیت میتوان به ضعف دانشی، تحریم، گران بودن فناوری و ملاحظات امنیتی در خصوص آن اشاره کرد.
آخرین یافتههای پژوهشی در سطح بینالمللی و داخلی نشان میدهد ناوبری ترکیبی، بسیار موفق عمل نموده و زیرساخت ناوبری بینایی مبنا SLAM میباشد. سیستمهای نقشهبرداری امروزی به آن تجهیز شده و ضمن افزایش سرعت و کاهش زمان عملیات زمینی، کیفیت محصولات مکانی در نقشهبرداری بهشدت بهبود یافتهاند.
شرکتهای رقیب اکثراً در حوزه هوافضا با هدف هدایت و کنترل متحرک مانند پهپاد یا ربات از الگوریتمهای ناوبری ترکیبی استفاده میکنند، برخلاف مهندسی نقشهبرداری، حساسیت بالایی در دستیابی به دقتهای بالای مکانی ندارند. لذا در مهندسی نقشهبرداری با چالشهای بیشتری در خصوص کالیبراسیون سامانه، مدلسازی خطاها، شناسایی و حذف خطاهای بزرگ، حل مسائل برآورد بهینه، اعتمادپذیری به نتایج و مانند آن سروکار دارد که پرداختن به آنها از اهداف اصلی این تحقیق بوده است.
از کشورها و شرکتهای پیشرو درزمینه توسعه سختافزار و نرم افزار ناوبری ترکیبی میتوان به شرکتهای زیر که اکثراً در کشورهای آمریکا، آلمان، ژاپن، کانادا، سوئیس و نروژ مستقر هستند، اشاره نمود.

برخی از شرکتهای فعال در زمینه ناوبری ترکیبی
۳. مشروح مسئله تحقیقاتی
هدف از انجام پژوهش همانطور که از نام آن پیداست طراحی و توسعه نرمافزاری و سختافزاری AHRS
Attitude and Heading Reference System)( است که در آن مشاهدات خام سنجنده ژیروسکوپ، شتابسنج و مغناطیسسنج و مختصات پردازششده گیرنده تعیین موقعیت ماهوارهای برای مقاصد تعیین موقعیت و وضعیت دوربینهای هوایی و زمینی در موبایل مپینگ با هم تلفیق و همزمانسازی میشوند.
مهمترین ضرورت انجام این پژوهش، عدم پیادهسازی سختافزاری و نرمافزاری الگوریتمهای ناوبری ترکیبی روی یک سامانه واقعی نقشهبرداری متحرک در کشور است. اصولاً امروزه سیستمهای موبایلمپینگ حرف اول را در صنعت مهندسی نقشهبرداری میزنند و هنوز یک سامانه مستقل موبایل مپینگ برای رفع نیازها در داخل کشور توسعه داده نشده است. علاوه بر این تحریمها موجب عقبماندگی کشور در این حوزه بسیار کاربردی شدهاند و اگر هم بتوان سامانهای را وارد کشور نمود با توجه به شرایط کنونی کسبوکار در کشور، توجیه اقتصادی ندارد. قدم اول، ایجاد چنین سامانهای به عنوان قلب برداشت مشاهدات خام و انجام محاسبات هندسی موبایل مپینگ میباشد که در نهایت در قالب سامانههای نقشهبرداری زمینی، هوایی، زیرسطحی و فضایی قابل استفاده است. بعد از توسعه AHRS، قدمهای بعدی عبارتند از توسعه (Inertial Navigation System)INS، تلفیق GNSS/IMUو تلفیق GNSS/IMU/SLAM/ODM که در طرحهای آتی به آن پرداخته خواهد شد.
شرکت برای توسعه سامانههای نقشهبرداری متحرک هوایی و زمینی خود، نیاز به این پژوهش داشته و بدون آن، توسعه سامانههای مستقل و خاص برای کاربردهای مختلف عملی نمیباشد. برای مثال برای نقشهبرداری شهری، در شرکت یک سامانه فتوگرامتری هوایی توسعه داده شده است که اگرچه در نوع خود در کشور بینظیر میباشد و اصولاَ شرکت رتبه دانشبنیانی خود را از آن کسب نموده است اما مهمترین ضعف سامانه موجود، عدم حل مشکل ناوبری دقیق است که نیاز به برداشت نقاط کنترل زمینی را اجتنابناپذیر میسازد و منجر به افزایش زمان و هزینه در پروژههای اجرایی خواهد شد. درصورتیکه سامانه PPK فوق توسعه یابد میتوان با دقت بالایی و بدون نیاز به نقاط کنترل زمینی، محصولات مکانی مانند DEM، ارتوفتوموزائیک و نقشههای سهبعدی را با کیفیت بالاتر و زمان و هزینه کمتر تولید نمود.
در صورت موفقیت در انجام این پژوهش کلیدی و پیادهسازی الگوریتمهای موردنیاز در ناوبری ترکیبی که شرح جزئیات آن در ادامه خواهد آمد، امکان توسعه سیستمهای موبایلمپینگ دستی، زمینی، هوایی و فضایی فراهم خواهد آمد. این امر به معنی دستیابی و فتح بازار بسیار بزرگ نقشهبرداری در کشور و منطقه از طریق افزایش رقابتپذیری در کیفیت، هزینه و زمان است. برای مثال در ایران ۱۳ کلانشهر، بیش از ۲۰۰۰ شهر بزرگ و ۶۰ هزار روستا در کنار ۲۰۵ هزار کیلومتر جاده آسفالت وجود دارد. دستیابی به شهر هوشمند و راه هوشمند نیازمند برداشت اطلاعات دقیق و بههنگام از همه این شهرها و راهها با سامانههای موبایلمپینگ است. در حال حاضر تمام این سامانهها در کلاس فناوریهای سطح بالا قرار داشته و با توجه به مشکلات تحریم، ورود آنها به کشور نیز علاوه بر هزینه بسیار بالای چند صدهزار تا میلیون دلاری با مشکلات فراوانی و بدون پشتیبانی فنی همراه است. این موضوع، هزینههای برداشت داده را که باید بهصورت دورهای انجام شود بهشدت بالا میبرد. درصورتی که بتوان سیستمهای موبایل مپینگ را با توان داخل توسعه داد؛ بسیاری از این مشکلات مرتفع شده و موضوع هوشمندسازی میتواند به واقعیت عملی در کشور منجر شود. قلب دستیابی به این فناوری، توسعه الگوریتمهای مطرح در این پژوهش یعنی ناوبری ترکیبی با مشاهدات خام روی بردهای الکترونیکی توسعه داده شده توسط همکاریهای قبلی این شرکت با تیم دانشگاهی بوده است. لذا این تحقیق ادامه این همکاری و توسعه سامانه یک گام رو به جلو است.
۴. چالشهای نیاز فناورانه
مهمترین چالش این تحقیق انجام موارد زیر با مشاهدات خام واقعی میباشد:
- حذف، کاهش و مدلسازی نویز مشاهدات خام ژیروسکوپ، شتابسنج و مغناطیسسنج؛
- کالیبراسیون سنجندهها از لحاظ هندسی و زمانی؛
- نرخ متفاوت مشاهدات سنجندههای مختلف و نحوه مدیریت و همزمانسازی آنها؛
- الگوریتم تلفیق مشاهدات و تنظیمات مربوطه؛
- پایداری سامانه در شرایط محیطی پروژه اجرایی.
هنوز موارد فوق با دقتهای مطلوب و مدنظر مهندسی نقشهبرداری در عمل و روی مشاهدات خام حاصل از بردهای سختافزاری برداشت داده خام در داخل کشور انجام نشده است. موفقیت در این چالش و حل مشکلات فوق منجر به توسعه یک سامانه عملی ناوبری ترکیبی با گرید نقشهبرداری دقیق خواهد شد.
با توجه به چالشهای فوق میتوان از مهمترین نوآوریهای این طرح، موارد زیر را برشمرد:
- طراحی و توسعه سامانه ناوبری ترکیبی برای اولین بار در ایران؛
- نرخ بالای برداشت و تلفیق داده برای بهکارگیری در تصویربرداری هوایی با سرعت بالا؛
- امکان همزمانسازی با چند دوربین برای توسعه سامانه موبایلمپینگ زمینی و هوایی در ساخت شهر سهبعدی.
۵. شماتیک ساخت و اجرا
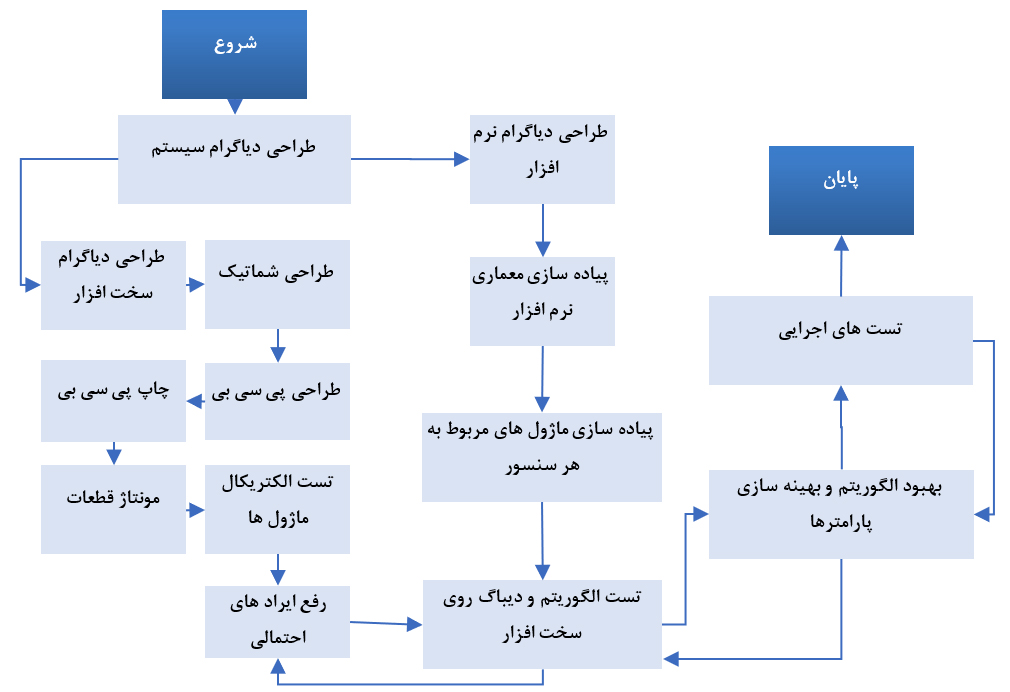
شماتیک فرایند و مراحل انجام پروژه
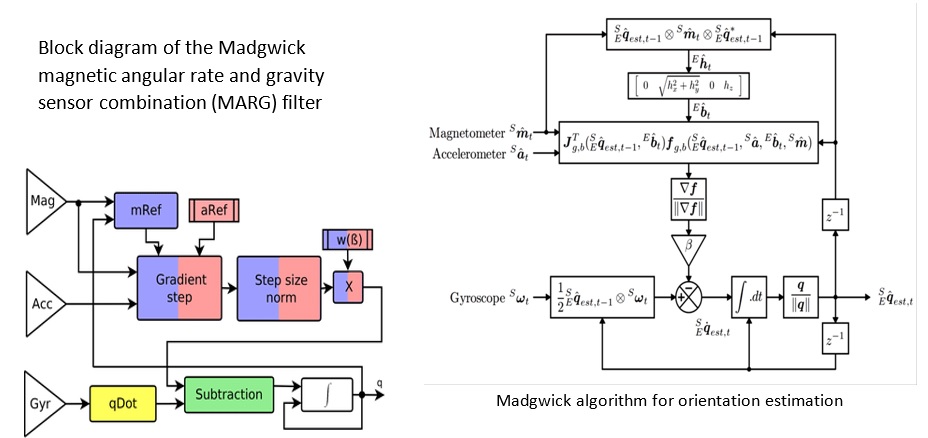
الگوریتم Madgwick مورد استفاده
۶. گامهای تحقیقاتی و الزامات طرح
در این تحقیق بایستی یک برد الکترونیکی با قابلیت ذخیرهسازی دادههای سنسورهای شتابسنج و ژیروسکوپ، مغناطیسسنج، گیرنده مولتیفرکانس ماهوارهای طراحی و توسعه داده شود. در ادامه، هدف نهایی این پروژه انجام محاسبات تعیین موقعیت )Lat, Long, Height( و تعیین وضعیت )Roll, Pitch, Yaw( به همراه دقت موارد محاسبه شده (ماتریس واریانس و کواریانس) در سیستم مختصات WGS84 میباشد. پیشنهادی از سنسورهای مورد استفاده روی برد الکترونیکی که مبنای محاسبات تعیین موقعیت و وضعیت دادههای خام این سنسورها میباشد به شرح ذیل است:
- یک عدد گیرنده ماهوارهای مولتی فرکانس که دادههای خام )pseudo range, Doppler, carrier phase, phase lock and signal quality information ( را با فرکانس ۱۰ هرتز و بهتر ذخیره میکند.
- یک عدد سنسور مغناطیسسنج با فرکانس نمونهبرداری 350 هرتز و بهتر؛
- یک عدد شتابسنج و ژیروسکوپ MEMS با فرکانس نمونهبرداری ۲۰۰۰ هرتز و بهتر.
۷. مراحل اصلی انجام کار
- توسعه برد الکترونیکی حاوی شتابسنج، ژیروسکوپ و مغناطیسسنج وGNSS؛
- محاسبات کالیبراسیون شتابسنج، ژیروسکوپ و مغناطیسسنج میباشد. (کالیبراسیون عدم تعامد محورهای ژیروسکوپ و شتابسنج که یکبار هنگام تولید محصول انجام میشود (نیازمند میز دقیق) و همچنین محاسبات کالیبراسیون ثانویه)؛
- محاسبات AHRS: محاسبه heading و roll و pitch منطبق بر لحظه نمونهبرداری ژیروسکوپ و شتابسنج با فرکانس 1000 هرتز بصورت آفلاین روی PC؛
- محاسبات AHRS با فرکانس 200-400 هرتز بصورت آنلاین با C++ بهینهسازی شده روی برد الکترونیکی؛
- همزمانسازی مشاهدات ژیروسکوپ، شتابسنج، مغناطیسسنج و GNSS در حالت آنلاین؛
- همزمانسازی موقعیت و وضعیت AHRS با لحظات تصویربرداری بهصورت آفلاین؛
- امکان تنظیم و کنترل پارامترهای GNSS/AHRS در حین پرواز بهصورت آنلاین و آفلاین.
۸. خروجی نهایی تحقیق
خروجیهای مورد انتظار شامل موارد زیر خواهد بود:
- برد الکترونیکی AHRS/GNSS با قابلیت اتصال به حداقل ۵ دوربین؛
- نرمافزار محاسبات کالیبراسیون شتابسنج، ژیروسکوپ و مغناطیسسنج و محاسبات AHRS؛
- گزارش فنی آزمونهای عملی و نتایج پردازشها و ارزیابی آنها.
۹. مشخصات خروجی
- ابعاد هندسی: ۱۰*۱۵*۵ سانتیمتر؛
- تعداد پورتها: دو پورت آنتن جیاناساس، یک پورت ۲۰ پین ارتباط با ۵ دوربین، یک پورت ۲ پین پاور ورودی، دو پورت یو اس بی، یک پورت شبکه، یک پورت کارت حافظه، یک پورت سیمکارت، یک پورت ارتباطRS232 ؛
- مشخصات کیفیت و نرخ داده خروجی: تلورانس زاویه ۰.۰۵ درجه و نرخ داده ۲۰۰ تا ۴۰۰ هرتز.
۱۰. شماتیک طراحی صنعتی محصول
در شکل زیر یک شماتیک نمونهای که محصول نهایی بعد از ساخت خواهد داشت، آورده شده است.

شماتیک طراحی صنعتی محصول نهایی پروژه
۱۱. تسهیم مالکیت فکری
- مالکیت معنوی: مجری در مالکیت معنوی ناشی از اجرای تحقیق سهیم خواهد بود و انتشار مقاله مشترک توسط مجری و متقاضی در ژورنالهای داخلی و خارجی، ارائه مقاله در کنفرانسها و سمینارها با موافقت شرکت و اشاره به نام همه دستاندرکاران مجاز خواهد بود.
- مالکیت منافع مادی: مالکیت مادی ناشی از طرح های برگزیده، متعاقبا در درجریان مذاکرات بین بنیاد و متقاضی تعیین تکلیف خواهد شد. بدیهی است با توجه به مدل کسبوکار شرکت متقاضی، منافع مالی ناشی از توسعه این فناوری قابل اشتراک بین متقاضی و مجری خواهد بود.
۱۲. نحوه پذیرش
پذیرش طرحها رقابتی است و از بین پروپوزالهای دریافتی، موردی که شرایط زیر را داشته باشد، در اولویت خواهد بود.
- ترکیب متخصصین تیم پیشنهادی مرتبط باشد.
- افراد پیشنهادشده، دارای سابقه پژوهشی و فنی در آن موضوع باشند.
- زمانبندی، هزینه و شرح خدمات، متناسب و مرتبط با پژوهش موردتقاضا باشد. (در این بخش، مجری میتواند برآورد اولیه خود را اعلام کند اما بدیهی است جزئیات اجرایی در ابتدای امر مشخص نیست و مجری و کارفرما با علم به این موضوع وارد این توافق خواهند شد)
- تیم پیشنهاددهنده، زیرساخت انجام پژوهش اعم از آزمایشگاه و کارگاه را داشته باشند.
- پروپوزال، طبق فرمت پیشنهادی بنیاد، تهیه و ارسال شده باشد.
هزینههای قابل قبول
- حق التحقیق نیروی انسانی
- تستها و آنالیزها
- خدمات
حوزه های اولویت دار
مهندسی/ عمران / نقشهبرداری
واجدین شرایط
پژوهشگر اصلی تیم لازم است عضو هیئتعلمی یکی از دانشگاهها و مؤسسات آموزش عالی کشور باشد.
پس از دریافت پروپوزال از طریق سامانه، ارزیابی انجام گرفته و در صورت کسب امتیاز بالا، تیم برگزیده جهت مذاکره با بنیاد و شرکت متقاضی دعوت خواهد شد.
فایلهای پیوست
تاریخ فراخوان
کلیه افراد واجد شرایط به مدت یک ماه از تاریخ انتشار فراخوان یعنی تا ۱۸ مرداد فرصت دارند که پروپوزال خود را از طریق سامانه کایپر برای بنیاد ملی علم ایران ارسال نمایند.
مبلغ حمایت
پژوهش پیشنهاد شده تا سقف ۸۰ درصد، حداکثر ۲ میلیارد تومان، توسط بنیاد ملی علم ایران حمایت خواهد شد. بدیهی است که مابقی هزینهها باید توسط شرکت متقاضی پژوهش تأمین شود.
شیوه ثبت نام و ارسال درخواست
پژوهشگران گرامی جهت ثبتنام میتوانند به سامانه کایپر مراجعه و از طریق بخش متقاضیان/ پژوهشگران اقدام نمایند. درصورتیکه در این سامانه پروفایل مشخصات فردی ندارید، ابتدا ثبتنام نموده و سپس بهوسیله نام کاربری (Email) و رمز عبور اعطا شده وارد سامانه شوید. پس از ورود در بخش ارسال طرح جدید میتوانید از کارتابل پژوهش عمیق شرکتهای دانشبنیان اقدام به ارسال طرح نمایید.
مسئول پاسخگویی
در صورت داشتن هرگونه سوال میتوانید با کارگروه دانشبنیان با ایمیل amini.m@insf.org و شماره تلفن ۰۲۱۸۲۱۶۱۱۲۱ تماس بگیرید.
علاقمندان میتوانند اخبار و رویدادهای بنیاد ملی علم را در شبکه های اجتماعی زیر دنبال کنند:
 کانال بنیاد ملی علم ایران در بله: https://ble.ir/insf_pr
کانال بنیاد ملی علم ایران در بله: https://ble.ir/insf_pr
 کانال بنیاد ملی علم ایران در ایتا: https://eitaa.com/insf_pr
کانال بنیاد ملی علم ایران در ایتا: https://eitaa.com/insf_pr
 کانال بنیاد ملی علم ایران در تلگرام: https://t.me/insf_pr
کانال بنیاد ملی علم ایران در تلگرام: https://t.me/insf_pr صفحه بنیاد ملی علم ایران در اینستاگرام instagram.com/insf_pr
صفحه بنیاد ملی علم ایران در اینستاگرام instagram.com/insf_pr