اعلام فراخوان جدید ذیل برنامه حمایت از پژوهش عمیق شرکتهای دانشبنیان؛
فراخوان «توسعه سیستم مکانیابی دقیق با حداکثر خطای قابل قبول مبتنی بر فیوژن سنسور برای هدستهای واقعیت افزوده در جراحی مغز و اعصاب»

توضیحات فراخوان
سیستمهای نورونویگیشن با وجود کاربرد گسترده در جراحیهای پیچیده، چالشهایی در دقت مکانیابی و نمایش اطلاعات دارند که بر کیفیت و ایمنی جراحیها تأثیر میگذارد. این فناوری کمک میکند تا عروق، اعصاب و آناتومی بیمار را قبل از برش و انجام جراحی به صورت سهبعدی مشاهده کنیم. هدف این پژوهش دستیابی به دانش فنی مکانیابی با حداکثر خطای قابل قبول در سیستمهای نورونویگیشن در هدستهای واقعیت افزوده (مانند هولولنز ۲، magic leap2 و ...) است. این پروژه بر توسعه الگوریتمهای پیشرفته مکانیابی با تلفیق دادههای سنسورهای مختلف هدست متمرکز است. هدف دستیابی به نرخ بهروزرسانی حداقل ۳۰ هرتز این فناوری، میتواند دقت و کارایی جراحیهای مغز و اعصاب را بهطور قابل توجهی بهبود بخشد، ریسک آسیب به بافتهای حساس را کاهش داده و نتایج جراحی را ارتقا بخشد.
پیشنیه مسئله پژوهش:
نورونویگیشن، به عنوان فناوری کلیدی در جراحیهای پیچیده بهویژه در حوزه مغز و اعصاب، طی سه دهه اخیر تحولی بنیادین ایجاد کرده است. این فناوری با همگامسازی دقیق تصاویر پیش از عمل، مانند سیتیاسکن و MRI، با آناتومی بیمار حین جراحی، به جراحان امکان میدهد تا با دقت بیشتری عمل کنند. با وجود این پیشرفتها، سیستمهای نورونویگیشن کنونی همچنان با محدودیتهایی از جمله ارائه دید دوبعدی در محیط جراحی سهبعدی و وابستگی به تجهیزات حجیم و گرانقیمت مواجه هستند. این محدودیتها، درک فضایی جراح از موقعیت ابزارها و ساختارهای آناتومیک را محدود کرده و استفاده از این فناوری را در تمامی مراکز درمانی با چالش روبهرو ساخته است.
در سالهای اخیر، پیشرفتهای چشمگیر در فناوری واقعیت افزوده، پتانسیل قابلتوجهی برای رفع محدودیتهای سیستمهای نورونویگیشن و ارتقای دقت و کارایی جراحی ایجاد کرده است. واقعیت افزوده با فراهم کردن امکان نمایش اطلاعات سهبعدی بهصورت همزمان با دید واقعی جراح، قابلیت افزایش درک فضایی، بهبود دقت جراحی و ارائه دید در لحظه را داراست. با این حال، ادغام فناوری واقعیت افزوده با سیستمهای نورونویگیشن، چالشهای فنی جدیدی را به همراه دارد. مهمترین این چالشها، دستیابی به خطای مکانی قابل قبول براساس مدل های ترکینگ است. این سطح از دقت نیازمند توسعه فناوریهای پیشرفته در زمینه مکانیابی، پردازش دادههای سنسوری و الگوریتمهای فیوژن سنسور است.
از منظر کلان، توسعه این فناوری میتواند منجر به کاهش هزینههای جراحی، کاهش ریسک عوارض جانبی، کاهش نیاز به جراحیهای مجدد، کمک به آموزش جراحان و شبیهسازی جراحیهای پیچیده شود. همچنین این فناوری میتواند دسترسی گستردهتری به فناوریهای پیشرفته در مراکز درمانی مختلف فراهم سازد، که در نهایت منجر به بهبود کیفیت مراقبتهای پزشکی در سطح ملی و جهانی خواهد شد. با توجه به اهمیت روزافزون دقت در جراحیهای پیچیده و پتانسیل بالای فناوری واقعیت افزوده، انجام این پژوهش بهمنظور توسعه یک سیستم مکانیابی دقیق و قابل اعتماد برای کاربردهای جراحی، از اهمیت ویژهای برخوردار است و میتواند گامی مهم در راستای ارتقای فناوری نورونویگیشن و بهبود کیفیت جراحیهای پیچیده بردارد.
شرح مسئله پژوهش:
پروژه حاضر، با هدف ارتقای دقت مکانیابی در سیستمهای نورونویگیشن واقعیت افزوده، به دنبال دستیابی به خطای تعیین موقعیت کمتر از یک میلیمتر است. این میزان دقت، پتانسیل قابل توجهی برای بهبود کیفیت و دقت جراحیهای مغز و اعصاب دارد. برای تحقق این هدف، تمرکز اصلی بر توسعه الگوریتمهای پیشرفته مکانیابی با استفاده از ترکیب دادههای سنسورهای مختلف موجود در هدستهای AR مانند هولولنز خواهد بود. این سنسورها شامل دوربینهای RGB، دوربینهای خاکستری، سنسور عمق و سنسور IMU هستند. بهرهگیری از تمامی دادههای این سنسورها به شکل یکپارچه، کلید دستیابی به دقت مطلوب در مکانیابی است .
به منظور ارائه تصویری پیوسته و روان به جراح در حین عمل، سیستم باید دادههای سنسورها را به صورت بلادرنگ پردازش نماید. دستیابی به نرخ بهروزرسانی حداقل 30 هرتز، یک الزام کلیدی در این راستا محسوب میشود. علاوه بر این، سیستم باید قادر باشد تا خطاهای ناشی از تغییرات نوری و دما را در محیط اتاق عمل تشخیص داده و میانگین این خطا را تا حد مناسبی کاهش دهد. کالیبراسیون دقیق سنسورها و حفظ پایداری این کالیبراسیون در طول جراحی، از دیگر الزامات حیاتی این پروژه به شمار میرود.
در این پروژه، سه مدل کلی برای ترکینگ مد نظر است:
مدل اول: استفاده از سنسورهای خود هدست واقعیت ترکیبی (افزوده):
- در این مدل، دادههای سنسورهای مختلف موجود در هدستهایی مانند هولولنز ۲ شامل سنسور نور مرئی (RGB)، سنسور IR و سنسورهای TOF بهصورت یکپارچه استفاده میشود.
- محدوده دقت قابل قبول در این حالت: حداکثر تا ۳ میلیمتر.
مدل دوم: استفاده از اسکنر بیرونی و نصب یک ترکر بر روی هدست واقعیت ترکیبی (افزوده):
- در این مدل، از یک اسکنر خارجی با دقت بالا مانند NDI و گویهای رترورفلکتیو نصبشده روی هدست استفاده میشود.
- محدوده دقت مورد انتظار در این حالت: بین نیم تا ۱ میلیمتر.
- این مدل نیازمند کالیبراسیون دقیق و قوی است.
مدل سوم: نصب پکیج سنسور مجزا بر روی هدست واقعیت ترکیبی (افزوده):
- در این مدل، یک پک سنسور مجزا با سنسورهای انتخاب شده بر روی هدست نصب می شود.
- محدوده دقت مورد انتظار در این حالت: بین نیم تا ۱ میلیمتر یا بهتر.
- انتخاب نوع سنسور و طراحی ستاپ سنسور در این مدل از اهمیت زیادی برخوردار است
شناسایی و ردیابی دقیق نقاط مرجع آناتومیکی، بخش مهم دیگری از این پروژه است. این مهم نیازمند توسعه الگوریتمهای پیشرفته پردازش تصویر است تا سیستم قادر باشد ساختارهای آناتومیکی را از تصاویر پزشکی پیش از عمل جراحی (مانند MRI یا سیتی اسکن) شناسایی نموده و با تصاویر زنده دوربینهای هدست مطابقت دهد. ثبت دقیق این تصاویر پیش از عمل با آناتومی واقعی بیمار، عنصری ضروری در دستیابی به دقت مطلوب است. از آنجا که بافت مورد استفاده برای نورونویگیشن واقعیت افزوده حین جراحی نباید دچار تغییر شکل شود، بافتهای استخوانی مانند جمجمه و عناصر مرتبط با آن، گزینههای مناسبتری برای این سیستم هستند. همچنین، دقت تصاویر MRI و سیتیاسکن معمولاً در حدود یک میلیمتر است، اگرچه در برخی سیستمهای پیشرفته میتواند بهتر باشد. هدف ما دستیابی به خطای حداقلی برای سیستم نهایی است. این امر به ما اجازه میدهد تا با در نظر گرفتن خطاهای مختلف در طول زنجیره پردازش، از جمله خطاهای رجیستریشن، ترکینگ و نمایش در هدستهای AR، به دقت نهایی بهینهای دست یابیم. این رویکرد، امکان بهبود دقت کلی سیستم را حتی در مواردی که دقت تصاویر اولیه محدود است، فراهم میکند. دادههای آموزشی مانند تصاویر سیتی و MRI برای توسعه و ارزیابی سیستم، در اختیار تیم مجری قرار خواهد گرفت.
طراحی رابط کاربری برای نمایش اطلاعات به جراح، نقشی اساسی در موفقیت این پروژه ایفا میکند. اطلاعات ضروری باید به نحوی ارائه شوند که جراح بتواند به سرعت و به سهولت آنها را درک کند، بدون آنکه دید او از محیط واقعی عمل مختل شود. علاوه بر این، سیستم باید با تجهیزات موجود در اتاق عمل، از جمله سیستمهای تصویربرداری و مانیتورینگ بیمار، سازگار باشد و استانداردهای ایمنی و امنیتی لازم برای استفاده در محیطهای پزشکی را رعایت نماید.

تصویر ۱) Microsoft HoloLens
کالیبراسیون دقیق سنسورها، که از مسئولیتهای تیم مجری است، باید با استفاده از سنسورهای موجود در هدستهای AR انجام شود. بااینحال، در صورت نیاز به سنسورهای اضافی، هزینههای مربوط به آن باید در پروپوزال لحاظ شود. بهمنظور ارزیابی دقت سیستم، پیشنهاد میشود از یک ترکر خارجی با دقت بسیار بالا، مانند ترکرهای شرکت NDI با دقت 0.1 میلیمتر در پوزیشن و روتیشن، استفاده شود. این پیشنهاد شرکت است و هزینههای مربوط به آن باید در پروپوزال توسط تیم مجری لحاظ گردد. شایان ذکر است با توجه به روشهای ذکر شده در مکانیابی هدستهای AR، مجموع خطاها نباید از ۰.۵ تا ۳ میلیمتر فراتر رود و این محدودیت باید در طراحی و پیادهسازی الگوریتمها مد نظر قرار گیرد.
شایان ذکر است که رجیستریشن تصاویر بیمار با آناتومی وی نسبت به یک رفرنس ثابت و محکم متصل به سر بیمار انجام میشود. در نتیجه، ترکینگ تمامی اجزا در طول جراحی نسبت به این رفرنس که نشاندهنده آناتومی بیمار است، صورت می پذیرد. تهیه دادههای آموزشی با استفاده از فانتومهای چاپ سهبعدی مبتنی بر سیتیاسکن و استفاده از سیستمهای کنترل با دقت بالا، یکی دیگر از اقدامات مهم پروژه است. تیم تحقیقاتی باید راهحلهای نوآورانهای ارائه دهد که شامل الگوریتمهای ترکیب دادههای سنسورها، روشهای پیشرفته پردازش تصویر و راهکارهای بهینهسازی عملکرد سیستم باشد تا دستیابی به دقت موقعیت در محدوده مورد نظر و الزامات عملکردی ذکر شده تضمین شود.
چالش نیاز فناورانه:
۱. دستیابی به دقت مکانیابی نیم تا ۳ میلیمتر (بر اساس مدل ترکینگ انتخابی برای هدستهای AR) بهعنوان گلوگاهی اساسی، مستلزم عبور از محدودیتهای سنسورهای مجزای تعبیه شده در هدست واقعیت افزوده است. صرف اتکا به دادههای سنسورهای RGB، مادون قرمز،TOF و IMU بهصورت مستقل، برای رسیدن به چنین دقتی کفایت نمیکند. استفاده از «فیوژن سنسور» با تجمیع و تحلیل همزمان دادههای این سنسورها، به منظور استخراج اطلاعات مکانی دقیقتر، امری اجتنابناپذیر است. چالش اصلی در این بخش، طراحی و پیادهسازی الگوریتمهای پیشرفتهای است که بتوانند دادههای ناهمگن سنسورها را به صورت بهینه ترکیب کرده و ضمن کاهش نویز و خطاهای اندازهگیری، دقت لازم را فراهم کنند. همچنین، کالیبراسیون دقیق و پایدار این سنسورها، بهویژه در شرایط محیطی متغیر اتاق عمل، از اهمیت زیادی برخوردار است. سیستم باید قادر باشد به صورت خودکار خطاهای کالیبراسیون را تشخیص داده و تصحیح کند تا اطمینان حاصل شود که دقت مکانیابی در طول زمان و در شرایط مختلف، حفظ میشود.
۲. پردازش دادههای سنسورها به صورت لحظهای و با کمترین تأخیر ممکن، یکی دیگر از چالشهای کلیدی پروژه است. نرخ بهروزرسانی موقعیت سیستم، که به طور ایدهآل باید ۶۰ هرتز باشد (حداقل ۳۰ هرتز)، نیازمند بهینهسازی الگوریتمهای مکانیابی و استفاده از روشهای پردازش موازی است. توجه به این نکته ضروری است که تأخیر در دریافت و پردازش دادهها تا ۱۰۰ میلیثانیه نیز میتواند قابل قبول باشد. به عنوان مثال، ممکن است داده با تاخیر ۱۰۰ میلیثانیه دریافت و پردازش شود، اما با استفاده از پردازش موازی و پردازش همزمان ۱۰ داده، میتوان به نرخ بهروزرسانی ۱۰ میلیثانیه برای موقعیت مکانی دست یافت. بنابراین، هدف اصلی دستیابی به نرخ بهروزرسانی بالا با کمترین تأخیر در نمایش موقعیت است، نه صرفاً تأخیر در دریافت دادهها. در همین راستا، بهینهسازی الگوریتمها برای اجرای سریع بر روی سختافزارها، از جمله چالشهای فنی این بخش به شمار میرود. این مسئله نیازمند بررسی دقیق پیچیدگی محاسباتی الگوریتمها و اعمال روشهای بهینهسازی کد و سختافزار است.
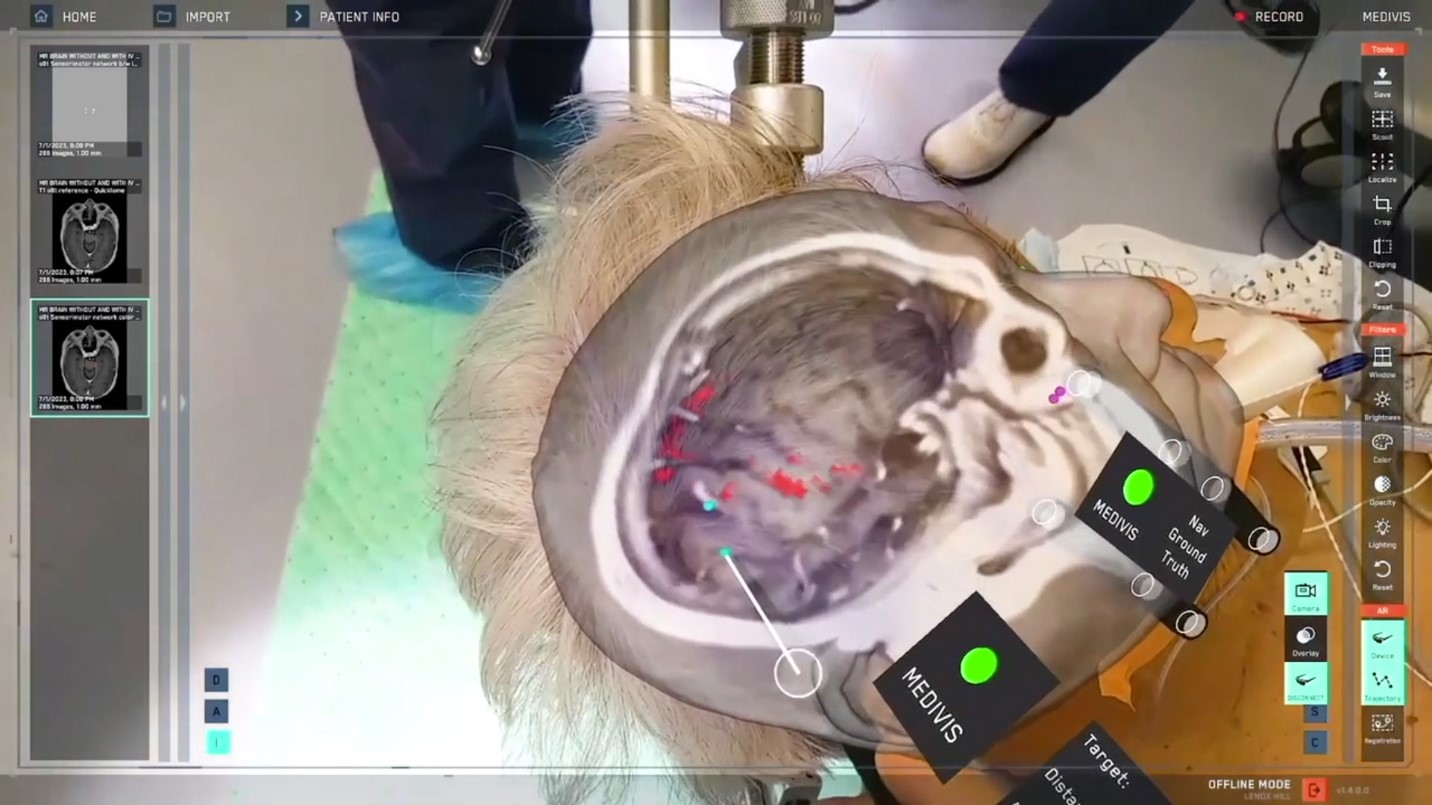
تصویر ۲) واقعیت افزوده Realtime حین جراحی
۳. در نهایت، عملکرد سیستم باید در شرایط واقعی محیط جراحی، که دارای محدودیتهای خاصی است، مورد ارزیابی قرار گیرد. محدودیت میدان دید، شرایط نوری متغیر، وجود بازتابهای نوری و محدودیت زمان کارکرد باتری، از جمله چالشهایی هستند که باید در طراحی و توسعه سیستم در نظر گرفته شوند. طراحی فیلترهای نرمافزاری برای حذف بازتابهای مزاحم، اطمینان از کفایت میدان دید هدستهای AR برای انجام جراحی، استفاده بهینه از توان باتری، و در نظر گرفتن یک منبع تغذیه خارجی در صورت نیاز، از جمله راهحلهایی است که میتوانند به مقابله با این چالشها کمک کنند. همچنین همانطور که ذکر شد تأکید میشود، سیستم باید قادر باشد به صورت خودکار کالیبراسیون سنسورها را انجام داده و خطاهای احتمالی را حین عمل تصحیح کند. این امر، نیازمند طراحی الگوریتمهای خودکار کالیبراسیون و تشخیص خطا است که بتوانند بهطور پویا با تغییرات محیطی سازگار شوند. بهطور خلاصه، این پروژه مستلزم یکپارچهسازی دقیق و مؤثر دانش و تکنولوژیهای مختلف در زمینههای مهندسی نرمافزار، سختافزار، بینایی ماشین و پردازش سیگنال است تا بتوان به یک سیستم مکانیابی دقیق، پایدار و قابل اعتماد برای جراحیهای مغز و اعصاب دست یافت.
گامهای تحقیقاتی و الزامات طرح:
گامهای تحقیقاتی پیشنهادی بهمنظور دستیابی به نتایج مدنظر این طرح به شرح زیر است:
مطالعات پایه و آمادهسازی:
- تحلیل مقالات مرتبط با مکانیابی دقیق و روشهای فیوژن سنسور در کاربردهای پزشکی.
- بررسی قابلیتها و محدودیتهای سختافزاری هدست و سنسورهای آن.
توسعه الگوریتمهای مکانیابی:
- برقراری ارتباط با سنسورهای هدست موردنظر RGB، مادون قرمز، IMU، TOF و سنسورهای خارجی (در صورت نیاز براساس مدل ترکینگ انتخابی) و استخراج دادههای خام.
- طراحی ساختار مناسب برای ذخیرهسازی و مدیریت دادههای سنسوری به صورت سازمانیافته.
- ثبت دادهها در محیطهای مختلف (آزمایشگاهی و شبیهسازی شده) برای پوشش شرایط متنوع.
تهیه داده Ground Truth با سنسورهای خارجی:
- استفاده از سنسورهای خارجی با دقت بالا (مانند ترکرهای NDI) برای ثبت دقیق موقعیت و جهت مرجع.
- همگامسازی دادههای Ground Truth با دادههای سنسورهای هدست.
پیشپردازش دادههای سنسوری و ادغام:
- اعمال روشهای پیشپردازش بر روی دادههای سنسوری (نویزگیری، حذف اطلاعات نامربوط، نرمالسازی).
- همگامسازی و ادغام دادههای سنسورهای مختلف برای ایجاد یک مجموعه داده منسجم و قابل استفاده.
- آمادهسازی دادهها برای ورود به مدل/الگوریتم مکانیابی.
- طراحی و آموزش مدل/الگوریتم مکانیابی
تست عملکرد، پایداری و قابلیت اطمینان:
- سیستم باید در طول یک بازه زمانی مشخص (تقریبا، ۲ ساعت) با حداقل میزان افت عملکرد (حداکثر ۵ درصد) عمل کند. پایداری در برابر نویز نیز با انجام تستهایی در شرایط نوری مختلف و با حضور منابع نویز الکترومغناطیسی اندازهگیری خواهد شد.
- در تست عملکرد دقت مکان یابی با محاسبه میانگین خطای سیستم در اندازه گیری موقعیت یک شیء مشخص (برابر با حداکثر خطای مکانیابی) و نیز با محاسبه انحراف معیار این خطا اندازهگیری خواهد شد.
- سیستم باید در ۹۵ درصد از موارد، خروجی صحیح و بدون خطا تولید کند. همچنین، توانایی سیستم در شناسایی و گزارش خطاهای احتمالی باید مورد ارزیابی قرار گیرد.
- ارزیابی عملکرد سیستم در شرایط شبیهسازی شده با حرکات دینامیکی سر، با استفاده از پلتفرمهای شبیهساز حرکت سر یا فانتومهای دینامیکی.
- ارزیابی میدان دید سیستم در زوایای مختلف دید و ارزیابی عملکرد سیستم در صورت حضور موانع ناشی از جراح یا تجهیزات جراحی.
تهیه مستندات فنی
خروجی نهایی پژوهش:
- ارائه سیستم مکانیابی دقیق و بلادرنگ مبتنی بر فیوژن سنسور:
- دستیابی به الگوریتم مکانیابی با حداکثر خطای قابل قبول بر اساس مدل ترکینگ انتخابی برای هدست واقعیت افزوده
- مدل ۱: حداکثر خطای ۳ میلیمتر
- مدل ۲ و ۳: خطای نیم تا ۱ میلیمتر یا کمتر
- دستیابی به نرخ بهروزرسانی موقعیت سیستم حداقل ۳۰ هرتز، با استفاده از پردازش موازی دادهها و بهینهسازی الگوریتمها
- تاخیر در دریافت و پردازش دادهها تا ۱۰۰ میلیثانیه مجاز است، به شرطی که نرخ بهروزرسانی نمایش موقعیت در محدوده هدف حفظ شود
- تأیید کارایی سیستم در محیطهای شبیهسازی شده و واقعی:
- ارزیابی سیستم با دادههای Ground Truth و سنسورهای دقیق خارجی
- تست عملکرد و پایداری سیستم در محیطهای جراحی شبیهسازی شده
- ارائه گزارش ارزیابی دقیق از عملکرد سیستم
- ارائه نسخه اولیه نرمافزار با رابط کاربری مناسب:
- ادغام الگوریتم مکانیابی با سیستم واقعیت افزوده هدست
- طراحی و ارائه رابط کاربری بصری و کاربرپسند برای استفاده در محیط جراحی
تسهیم مالکیت فکری
- مالکیت معنوی: مجری در مالکیت معنوی ناشی از اجرای پژوهش سهیم خواهد بود و انتشار مقاله مشترک توسط مجری و متقاضی در ژورنالهای داخلی و خارجی، ارائه مقاله در کنفرانسها و سمینارها با موافقت و اشاره به نام همه دستاندرکاران مجاز خواهد بود.
- مالکیت منافع مادی: با توجه به مدل کسبوکار شرکت متقاضی، منافع مالی ناشی از توسعه این فناوری قابل اشتراک بین متقاضی و مجری میباشد.
نحوه پذیرش
پذیرش طرحها رقابتی است و از بین پروپوزالهای دریافتی، موردی که شرایط زیر را داشته باشد، در اولویت خواهد بود:
- ترکیب متخصصین تیم پیشنهادی مرتبط باشد.
- افراد پیشنهادشده، دارای سابقه پژوهشی و فنی در آن موضوع باشند.
- زمانبندی، هزینه و شرح خدمات، متناسب و مرتبط با پژوهش موردتقاضا باشد. (در این بخش، مجری میتواند برآورد اولیه خود را اعلام کند اما بدیهی است جزئیات اجرایی در ابتدای امر مشخص نیست و مجری و کارفرما با علم به این موضوع وارد این توافق خواهند شد.)
- پروپوزال، طبق فرمت پیشنهادی بنیاد ملی علم، تهیه و از طریق سامانه کایپر ارسال شده باشد.
- فونت حروف و اعداد فارسی B Nazanin و اندازه قلم ۱۳ و فونت حروف و اعداد انگلیسی، Times New Roman و اندازه قلم ۱۱ باشد.
هزینههای قابل قبول
- حقالتحقیق نیروی انسانی؛
- تستها و آنالیزها؛
- خدمات؛
- مواد اولیه.
حوزه های اولویت دار
- نرم افزار
- هوش مصنوعی
- بینایی ماشین
- الکترونیک
واجدین شرایط
پژوهشگر اصلی تیم لازم است عضو هیئتعلمی فعال یکی از دانشگاهها و مؤسسات آموزش عالی کشور باشد. پس از دریافت پروپوزال از طریق سامانه، ارزیابی انجام گرفته و در صورت کسب امتیاز بالا، تیم برگزیده جهت مذاکره با بنیاد و شرکت متقاضی دعوت خواهد شد.
فایلهای پیوست
تاریخ فراخوان
کلیه افراد واجد شرایط به مدت یک ماه از تاریخ انتشار فراخوان یعنی تا ۱۵ اسفند فرصت دارند که پروپوزال خود را از طریق سامانه کایپر برای بنیاد ملی علم ایران ارسال نمایند.
مبلغ حمایت
پژوهش پیشنهاد شده تا سقف ۸۰ درصد، حداکثر ۲/۵ میلیارد تومان، توسط بنیاد ملی علم ایران حمایت خواهد شد. بدیهی است که مابقی هزینهها باید توسط شرکت متقاضی ارائه دهنده پژوهش تأمین شود.
شیوه ثبت نام و ارسال درخواست
متقاضیان جهت ثبتنام میتوانند به سامانه کایپر مراجعه و از طریق بخش متقاضیان/ پژوهشگران اقدام نمایند. درصورتیکه در این سامانه پروفایل مشخصات فردی ندارید ابتدا ثبتنام نموده و سپس بهوسیله نام کاربری (Email) رمز عبور اعطا شده وارد سامانه شوید. پس از ورود در بخش ارسال طرح جدید میتوانید از کارتابل پژوهش عمیق شرکتهای دانشبنیان اقدام به ارسال طرح نمایید.
مسئول پاسخگویی
پژوهشگران پس از مطالعه توضیحات فراخوان و آیین نامههای مربوطه در پورتال بنیاد علم، در صورت داشتن هرگونه ابهام یا سؤال در خصوص فرایند ارسال طرح، شرایط و محتوای علمی فراخوان میتوانند از پروفایل خود در سامانه کایپر با کارگروه دانشبنیان از طریق تیکت، یا با ایمیل hatamkhani.a@insf.org سؤالات خود را مطرح نمایند و یا با شماره تلفن ۰۲۱۸۲۱۶۱۳۵۰(آقای حتمخانی) تماس حاصل فرمایند.
علاقمندان میتوانند اخبار و رویدادهای بنیاد ملی علم را در شبکه های اجتماعی زیر دنبال کنند:
 کانال بنیاد ملی علم ایران در بله: https://ble.ir/insf_pr
کانال بنیاد ملی علم ایران در بله: https://ble.ir/insf_pr
 کانال بنیاد ملی علم ایران در ایتا: https://eitaa.com/insf_pr
کانال بنیاد ملی علم ایران در ایتا: https://eitaa.com/insf_pr
 کانال بنیاد ملی علم ایران در تلگرام: https://t.me/insf_pr
کانال بنیاد ملی علم ایران در تلگرام: https://t.me/insf_pr صفحه بنیاد ملی علم ایران در اینستاگرام instagram.com/insf_pr
صفحه بنیاد ملی علم ایران در اینستاگرام instagram.com/insf_pr